@inproceedings{shaoul2025gco,title={Collaborative Multi-Robot Non-Prehensile Manipulation via Flow-Matching Co-Generation},author={Shaoul, Yorai and Chen, Zhe and Mohamed, Naveed Gul and Pecora, Federico and Likhachev, Maxim and Li, Jiaoyang},year={2025},url={https://gco-paper.github.io},booktitle={In submission, and also at AAAI-26 Workshop on Multi-Agent Path Finding},}
MOSAIC: A Skill-Centric Algorithmic Framework for Long-Horizon Manipulation Planning
Diffusion models have recently been successfully applied to a wide range of robotics applications for learning complex multi-modal behaviors from data. However, prior works have mostly been confined to single-robot and small-scale environments due to the high sample complexity of learning multi-robot diffusion models. In this paper, we propose a method for generating collision-free multi-robot trajectories that conform to underlying data distributions while using only single-robot data. Our algorithm, Multi-robot Multi-model planning Diffusion (MMD), does so by combining learned diffusion models with classical search-based techniques – generating data-driven motions under collision constraints. Scaling further, we show how to compose multiple diffusion models to plan in large environments where a single diffusion model fails to generalize well. We demonstrate the effectiveness of our approach in planning for dozens of robots in a variety of simulated scenarios motivated by logistics environments.
@inproceedings{shaoul2025multi,title={Multi-Robot Motion Planning with Diffusion Models},author={Shaoul*, Yorai and Mishani*, Itamar and Vats*, Shivam and Li, Jiaoyang and Likhachev, Maxim},booktitle={13th International Conference on Learning Representations (ICLR) and also at AAAI 2025 Workshop on Multi-Agent Path Finding},year={2025},recognition={Spotlight ⭐}}
Benchmarking Shortcutting Techniques for Multi-Robot Arm Motion Planning
@inproceedings{huang2025benchmarking,title={Benchmarking Shortcutting Techniques for Multi-Robot Arm Motion Planning},author={Huang, Philip and Shaoul, Yorai and Li, Jiaoyang},booktitle={Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},year={2025},}
2024
Accelerating Search-Based Planning for Multi-Robot Manipulation by Leveraging Online-Generated Experiences
An exciting frontier in robotic manipulation is the use of multiple arms at once. However, planning concurrent motions is a challenging task using current methods. The high-dimensional composite state space renders many well-known motion planning algorithms intractable. Recently, Multi-Agent Path-Finding (MAPF) algorithms have shown promise in discrete 2D domains, providing rigorous guarantees. However, widely used conflict-based methods in MAPF assume an efficient single-agent motion planner. This poses challenges in adapting them to manipulation cases where this assumption does not hold, due to the high dimensionality of configuration spaces and the computational bottlenecks associated with collision checking. To this end, we propose an approach for accelerating conflict-based search algorithms by leveraging their repetitive and incremental nature – making them tractable for use in complex scenarios involving multi-arm coordination in obstacle-laden environments. We show that our method preserves completeness and bounded sub-optimality guarantees, and demonstrate its practical efficacy through a set of experiments with up to 10 robotic arms.
@inproceedings{shaoul2024accelerating,title={Accelerating Search-Based Planning for Multi-Robot Manipulation by Leveraging Online-Generated Experiences},author={Shaoul*, Yorai and Mishani*, Itamar and Likhachev, Maxim and Li, Jiaoyang},booktitle={34th International Conference on Automated Planning and Scheduling (ICAPS)},year={2024},recognition={Best Student Paper 🤓}}
Unconstraining Multi-Robot Manipulation: Enabling Arbitrary Constraints in ECBS with Bounded Sub-Optimality
@inproceedings{shaoul2024unconstraining,title={Unconstraining Multi-Robot Manipulation: Enabling Arbitrary Constraints in ECBS with Bounded Sub-Optimality},author={Shaoul*, Yorai and Veerapaneni*, Rishi and Likhachev, Maxim and Li, Jiaoyang},booktitle={Proceedings of the International Symposium on Combinatorial Search (SoCS)},volume={17},year={2024},}
2021
Digital electronics in fibres enable fabric-based machine-learning inference
Gabriel Loke, Tural Khudiyev, Brian Wang, Stephanie Fu, and
10 more authors
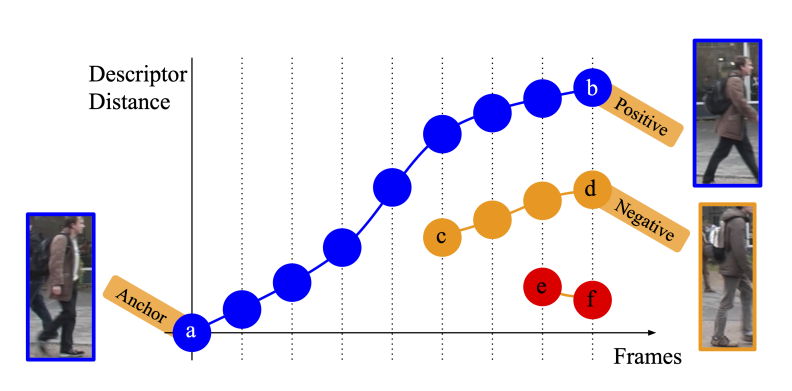
@article{shaoul2020online,title={Online Descriptor Enhancement via Self-Labelling Triplets for Visual Data Association},author={Shaoul, Yorai and Liu, Katherine and Ok, Kyel and Roy, Nicholas},journal={arXiv preprint arXiv:2011.10471},year={2020},}
 MOSAIC: A Skill-Centric Algorithmic Framework for Long-Horizon Manipulation PlanningIn submission, 2025
MOSAIC: A Skill-Centric Algorithmic Framework for Long-Horizon Manipulation PlanningIn submission, 2025