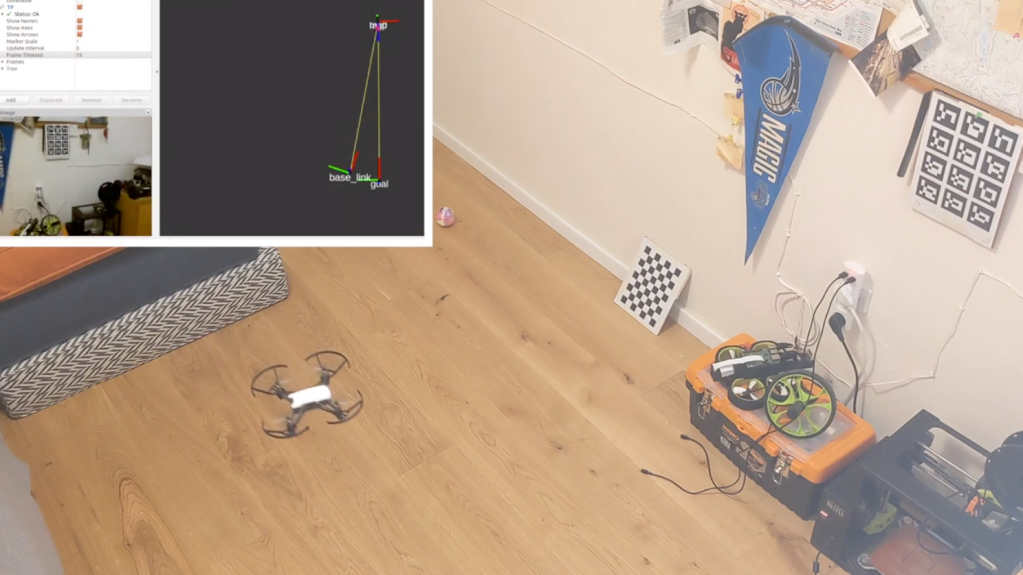
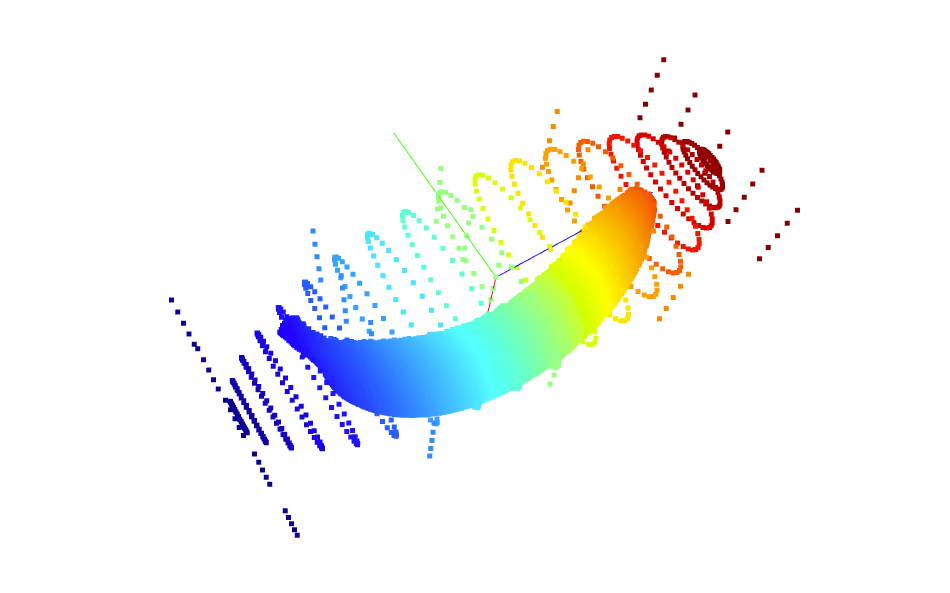
autonomy Botello Robot Tello Drone A Full Autonomous Stack, a Tutorial ROS + Raspberry Pi + Arduino + SLAM vision Large Scale Odomentry Learning Moncular Fisheye Odometry DELSE Deforming Ellipsoids for object Shape Estimation